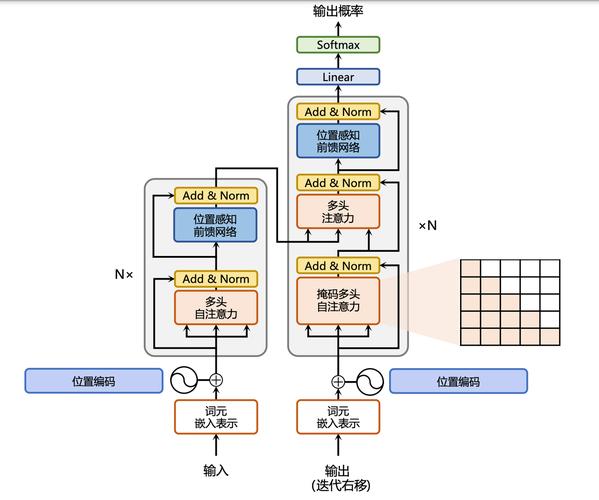
UniAct 是新型的具身基础模型框架,解决不同机器人之间行为异构性的问题。通过学习通用行为,捕捉不同机器人共享的原子行为特征,消除因物理形态和控制接口差异导致的行为异构性。UniAct 的架构包括通用行为提取器、通用行为空间和异构解码器。通用行为提取器基于视觉语言模型,通过观察和任务目标提取通用行为;通用行为空间以向量量化码本形式实现,每个向量代表一种原子行为;异构解码器将通用行为翻译为特定机器人的控制信号。

(图片来源网络,侵删)

(图片来源网络,侵删)


UniAct 是新型的具身基础模型框架,解决不同机器人之间行为异构性的问题。通过学习通用行为,捕捉不同机器人共享的原子行为特征,消除因物理形态和控制接口差异导致的行为异构性。UniAct 的架构包括通用行为提取器、通用行为空间和异构解码器。通用行为提取器基于视觉语言模型,通过观察和任务目标提取通用行为;通用行为空间以向量量化码本形式实现,每个向量代表一种原子行为;异构解码器将通用行为翻译为特定机器人的控制信号。

未来人工合成硅基生命的可能性与路径一、当前科学进展实验室突破2023年中国科大已实现硅基“人工叶绿体”能量转换,证明硅基分子可模拟生命能量代谢。2025年MIT开发的硅纳米机器人完成基础自复制,为硅基生命构建提供技术...

LongCat(龙猫)是美团自主研发的生成式AI大模型,通过人工智能技术提升公司内部工作效率和创新能力。模型具备强大的多模态能力,能处理文本、图像等多种数据类型,在生成任务上表现出色,例如快速生成图片、视频脚本、代码等。...


麦橘超然(MajicFlus)是麦橘推出的基于Flux.1架构的AI模型,专注于生成高质量的人像图像,擅长表现亚洲女性的细腻与美感。模型融合多种技术,能生成逼真的人物摄影风格,细致呈现头发、眼睛、雀斑等微小特征。...
食神是老板电器推出的首个烹饪垂直领域大模型。基于老板电器46年积累的海量烹饪数据,结合DeepSeek技术,能精准理解烹饪场景需求。用户可通过语音、文字等方式与“食神”交互,获取个性化菜谱推荐、健康膳食规划等服务。...


风宇是中国气象局联合南昌大学和华为共同推出的全球首个全链式空间天气大模型。模型基于创新的链式训练结构,结合卫星观测数据与数值模式数据,实现太阳风、磁层和电离层的全链式耦合模拟,突破传统模型的算力与实时响应瓶颈。...


雾象Fogsight是大型语言模型(LLM)驱动的动画生成智能体,用户输入抽象概念或词语,能生成高水平的生动动画。核心功能包括“概念即影像”,能将输入的主题转化为叙事完整的动画,包含双语旁白和电影级视觉质感;“智能编排”...


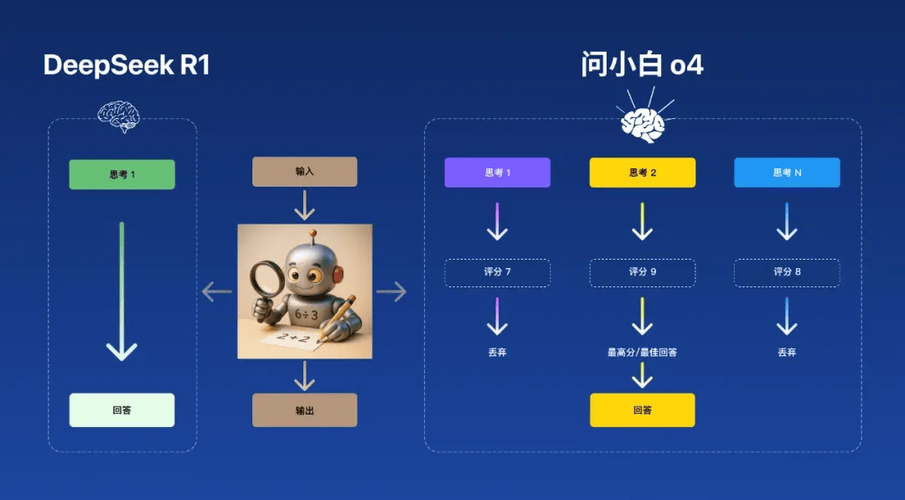
问小白o4是国内首个并行思考模型,能同时启动8条思考路径,自动筛选最优解,提供精准答案。模型融合Long‑CoT强化学习与过程奖励学习,具备深度推理和高质量思考筛选能力。...
通古大模型是华南理工大学深度学习与视觉计算实验室(SCUT-DLVCLab)推出的专注于古籍文言文处理的人工智能语言模型。基于百川2-7B-Base进行增量预训练,使用24.1亿古籍语料进行无监督训练,结合400万古籍对话数...
全部评论
留言在赶来的路上...
发表评论