

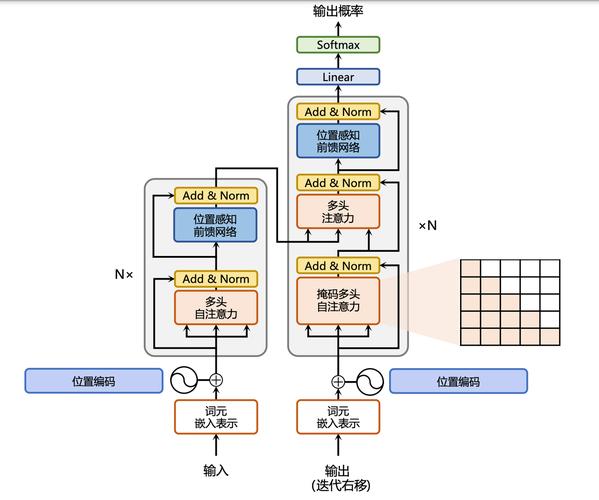
TinyVLA是一种面向机器人操控的视觉-语言-动作(VLA)模型,由华东师范大学和上海大学团队推出。针对现有VLA模型的不足,如推理速度慢和需要大量数据预训练,提出解决方案。TinyVLA基于轻量级的多模态模型和扩散策略解码器,显著提高推理速度,减少对大规模数据集的依赖。模型在模拟和真实机器人平台上经过广泛测试,证明在速度、数据效率以及多任务学习和泛化能力方面优于现有的先进模型OpenVLA。TinyVLA的推出,为机器人控制领域提供一种快速、高效的新方法,有望在资源受限的环境中实现快速部署和应用。

(图片来源网络,侵删)

(图片来源网络,侵删)










全部评论
留言在赶来的路上...
发表评论