DrivingDojo是中国科学院自动化研究所与美团无人车团队合作推出的数据集,用在训练和研究复杂的自动驾驶交互式世界模型。数据集包含18,000个视频片段,覆盖完整的驾驶操作、多智能体交互以及丰富的开放世界驾驶知识,为开发下一代自动驾驶模型提供了坚实的基础。DrivingDojo定义了动作指令跟随(AIF)基准,用在评估世界模型在执行动作控制的未来预测方面的能力。

(图片来源网络,侵删)

(图片来源网络,侵删)


DrivingDojo是中国科学院自动化研究所与美团无人车团队合作推出的数据集,用在训练和研究复杂的自动驾驶交互式世界模型。数据集包含18,000个视频片段,覆盖完整的驾驶操作、多智能体交互以及丰富的开放世界驾驶知识,为开发下一代自动驾驶模型提供了坚实的基础。DrivingDojo定义了动作指令跟随(AIF)基准,用在评估世界模型在执行动作控制的未来预测方面的能力。

VMB(Visuals Music Bridge)是中国科学院信息工程研究所、中国科学院大学网络空间安全学院、上海人工智能实验室、上海交通大学等机构推出的多模态音乐生成框架,能从文本、图像和视频等多种输入模态生成音乐。...
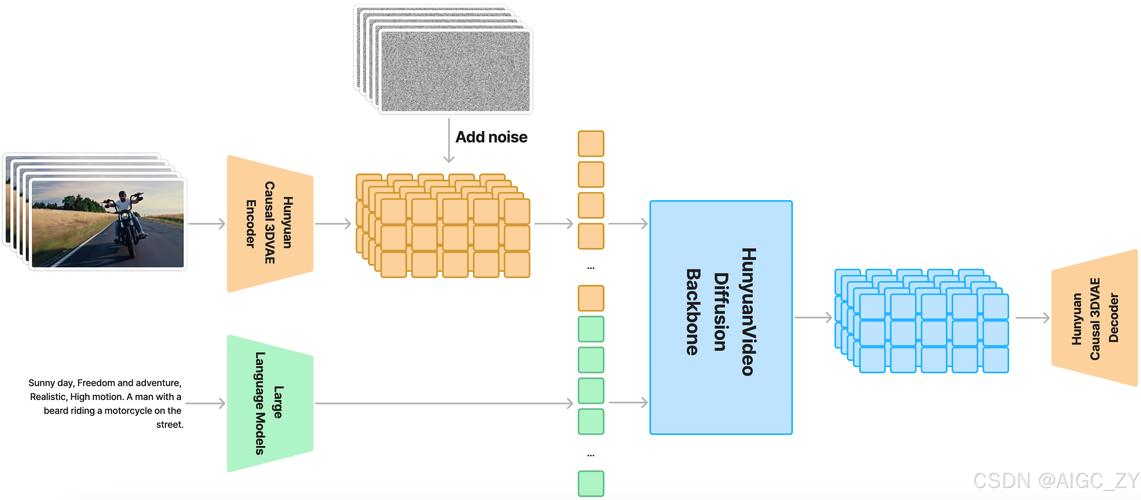
MTVCrafter是中国科学院深圳先进技术研究院计算机视觉与模式识别实验室、中国电信人工智能研究所等机构推出的新型人类图像动画框架,基于原始3D运动序列进行高质量动画生成。框架基于4D运动标记化(4DMoT)直接对3D运动...
LongDocURL是中国科学院自动化研究所和阿里巴巴淘宝天猫集团联合发布的多模态长文档理解基准数据集。专注于评估模型在处理长文档、复杂元素和多样化任务中的理解、推理和定位能力。...

DreamClear是中国科学院自动化研究所和字节跳动团队联合推出的高性能图像修复技术,专注于隐私安全的数据集管理,能将低质量(LQ)图像恢复为高质量(HQ)图像。...

AnchorCrafter是基于扩散模型的智能视频制作系统,用在自动生成具有高保真度的主播风格产品推广视频。基于整合人-物交互(HOI)到姿态引导的人体视频生成中,实现对物体外观和运动控制的高度还原,及对复杂人物-物体交互的...


AddressCLIP 是基于 CLIP 技术构建的端到端图像地理定位模型,中科院自动化所和阿里云联合开发。模型能通过一张照片实现街道级精度的定位,直接预测图像拍摄地点的可读文本地址。...


全部评论
留言在赶来的路上...
发表评论