

拜读维拉科技关于机器人相关信息的综合整理,涵盖企业排名、产品类型及资本市场动态:一、中国十大机器人公司(综合类)优必选UBTECH)聚焦人工智能与人形机器人研发,产品覆盖教育、娱乐及服务领域,技术处于行业前沿。EtherCAT科普系列(8):EtherCAT技术在机器视觉领域的应用机器人中科院旗下企业,工业机器人全品类覆盖,是国产智能工厂解决方案的核心供应商。埃斯顿自动化国产工业机器人龙头,实现控制器、伺服系统、本体一体化自研,加速替代外资品牌。遨博机器人(AUBO)协作机器人领域领先者,主打轻量化设计,适用于3C装配、教育等柔性场景。埃夫特智能国产工业机器人上市第一股,与意大利COMAU深度合作,产品稳定性突出。二、细分领域机器人产品智能陪伴机器人Gowild公子小白:情感社交机器人,主打家庭陪伴功能。CANBOT爱乐优:专注0-12岁儿童心智发育型亲子机器人。仿真人机器人目前市场以服务型机器人为主,如家庭保姆机器人(售价10万-16万区间),但高仿真人形机器人仍处研发阶段。水下机器人工业级产品多用于深海探测、管道巡检,消费级产品尚未普及。EtherCAT科普系列(8):EtherCAT技术在机器视觉领域的应用资本市场动态机器人概念股龙头双林股份:特斯拉Optimus关节模组核心供应商,订单排至2026年。中大力德:国产减速器龙头,谐波减速器市占率30%。金力永磁:稀土永磁材料供应商,受益于机器人电机需求增长。行业趋势2025年人形机器人赛道融资活跃,但面临商业化落地争议,头部企业加速并购整合。四、其他相关机器人视频资源:可通过专业科技平台或企业官网(如优必选、新松)获取技术演示与应用案例。价格区间:服务型机器人(如保姆机器人)普遍在10万-16万元,男性机器人13万售价属高端定制产品。
是基于软件与硬件的组合,通过装置和非接触式的自动地接受一个真实物体的图像,并利用软件处理图像以获得所需信息或用于控制运动的装置。机器视觉可以赋予机器人及获取外界信息并认知处理的能力。机器视觉系统内包含光学成像系统,可以作为自动化设备的视觉器官实现信息的输入,并借助视觉代替人脑实现信息的处理与输出。从而实现赋予自动化设备看与处理的能力,替代人眼完成生产制造中的识别、测量、定位以及检测等工作。
▲机器视觉的四大基础功能机器视觉作为工业传感的核心,是机器人和自动化设备的眼睛,是建设数字化工厂感知网络的关键节点,同时也是实现柔性化生产的重要组成部分。一个典型的机器视觉系统,一般包括:工业光源、工业镜头、工业相机、视觉(视觉软件及视觉控制硬件)等。其中,工业光源负责照亮目标并突出可视化特征,工业镜头负责将光源照亮的物体成像折射投影至工业相机感光元件,工业相机负责将感光元件接收到的图像采集并输送至控制系统,以上三个硬件部分负责成像功能。视觉控制系统则负责对成像结果进行处理分析、输出分析结果或控制指令至其他执行机构。
:EtherCAT技术在机器视觉领域的应用 第1张")
▲机器视觉系统构成图(来源:海康机器人)
:EtherCAT技术在机器视觉领域的应用 第2张")
随着技术不断走向成熟,对于物体检测、增强分析、监控容差和准确的组件测量等能力要求也逐渐提升,越来越多的制造企业开始采用机器视觉系统来实现生产过程中检查、测量和自动识别等功能的优化。从全球市场来看,GGII数据显示,2023年全球机器视觉市场规模 925.21亿元,2024年全球机器视觉市场规模有望突破1000亿元,同比增速 8.63%左右,预计至2028年全球市场规模有望接近1400 亿元,2024-2028年年均复合增长率约为8.20%。2023年中国机器视觉市场规模185.12亿元,2024年中国机器视觉市场规模有望突破200亿元,同比增速接近12%,预计至2028年我国机器视觉市场规模将超过395亿元,2024-2028年复合增长率约为17.5%。
01
机器视觉技术集成方式
在系统中集成机器视觉技术已经成为了一种趋势。目前,现有的视觉与控制系统的集成方法主要分为两类,即软件集成和集成。
软件集成
软件集成即是由摄像机采集图像,然后将图像信息通过成熟的通信方式如 PCI)、、串口、火线或TCP/IP协议直接传给PC,由PC中的专用软件进行图像处理,最终通过输出实现控制功能。该集成方法需通过非实时性传输大量的图像信息给PC,很容易成为整个系统性能提升的“瓶颈”所在。同时PC的如Windows,通常并不具有实时性,难以直接应用于对实时性有严格标准的工业控制当中,并且由于非实时性,系统进行图像处理时间无法确定,因此时间的波动性也较大。
▲机器视觉技术软件集成方式
通信集成
通信集成即是通过嵌入式设备直接进行图像的采集和处理,然后将处理的信息通过 USB、串口或 TCP/IP 协议输出给控制系统实现控制功能。智能相机是这种视觉集成方式的典型代表。该方法使得整个系统变得小巧,且具有一定的图像处理实时性,但是对于控制系统的实时性却无法保证,并且如果需要实现特定功能,其整个开发周期又十分漫长,难以满足实际需求。
▲机器视觉技术通信集成方式
在自动化程度较高的工业控制中,有大量集成机器视觉的应用需求,例如智能装配、快速分拣等。这些应用都对机器视觉的集成方法、稳定性、快速响应和实时性有着较高的要求;同时,现有的视觉集成方法如通信集成和软件集成具有实时性不足的缺点,复杂的传输环境使得视觉系统和控制系统间的关系变得难以预测,这对需要实时控制的应用来说影响很大;同时传统的视觉算法大多依赖于PC,应用成本高且难以向设备小型化发展。德国倍福公司提出了一种解决实时性不足的EtherCAT技术,该技术以传统的为基础,并充分利用了其全双工的通信方式,使数据的传输具有可预测和同步精度高的特点。同时,该技术在数据链路层使用实时调度的软核,并利用双进行 PDO(过程数据对象)的传输,从而有效的提高了实时性。
02
基于EtherCAT的机器视觉集成系统
基于EtherCAT视觉系统集成技术,使用EtherCAT将机器视觉系统与运动控制系统集成,视觉系统与运动控制系统间关系得到了确定,从而使该视觉集成方法拥有良好的实时性和确定性,同时使用SPI集成了具有图像处理功能的视觉模块,不仅减少了传输的数据量,还对PC的依赖小,可满足如今设备小型化发展的需求;脚本化的方式也降低了开发难度,提高了效率。
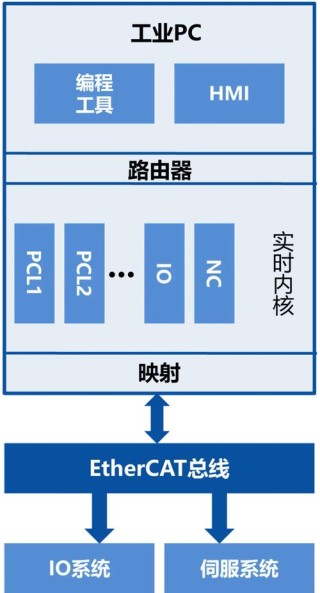
▲基于EtherCAT机器视觉系统集成技术示意图基于EtherCAT的机器视觉集成系统由视觉检测和运动控制两部分组成。
视觉检测部分的图像数据采集由工业相机完成。图像处理任务由控制器完成。运动控制部分主要是EtherCAT主站和从站的搭建,控制命令由主站发出经从站传递给,完成对工作台的运动控制。控制系统采用普通PC+EtherCAT从站的形式。图像处理单元和EtherCAT主站通过EtherCAT总线完成数据共享。视觉系统EtherCAT从站由从站控制器芯片和共同搭建包括通信板和视觉检测两部分。通信板经网口实现与系统主站的EtherCAT通信功能,接收系统主站发送的EtherCAT下行数据帧并进行解析,获取主站发送的控制信息并将控制信息通过SPI接口转发给视觉检测微处理器,同时将视觉检测采集的数据信息经SPI接口插人到EtherCAT数据帧中返回给主站。运动控制从站由驱动模块(驱动或者驱动等)和执行器(臂等)组成。视觉检测将图像处理后提取的源图像宽高等信息通过EtherCAT通信板传给主站,同时驱动模块从站将执行器执行结果信息反馈传给主站。主站收到后进行转换输出,执行对工件的实时控制指向。
▲基于EtherCAT的机器视觉系统框架
03
码灵半导体EtherCAT机器视觉系统解决方案
EterCAT从站的核心部分是EterCAT从站控制器芯片(ESC),ESC使用双端口 RAM 实现EtherCAT 主站和从站之间的数据交换。码灵半导体推出的CF110x系列为EtherCAT机器视觉系统从站控制器芯片提供了全新的选择。
▲码灵半导体CF110x系列芯片实物图
码灵半导体CF110x系列芯片内部集成了两个以太网PHY,不再需要额外PHY,大大的简化了外围。同时该芯片每一个PHY包含了一个全双工100BASE-TX,支持双工100Mbps的工作频率,在借助光纤收发装置情况下还支持100Mbps光纤通信,支持Auto-Negoation自动协商、Auto-MDIX自动交叉识别功能,所以在设计时可以采用交叉LAN 光缆或者直接连接。CF110x系列从站控制器具有8KB的DPRAM和8个FMMU,还包括8个SyncManager,同时该ESC可以通过8/16位总线与8/16/32位微处理器相连。CF110x系列工作时可提供缓冲和邮箱两种工作模式。缓冲模式下,EtherCAT主器件和本地微处理器可同时对器件执行写入操作,但由于该ESC的缓冲区始终只包含最新数据,如果新数据在旧数据读出前到达,旧数据将被覆盖。这也就意味着我们需要在数据在覆盖之前执行读取操作。邮箱模式下,EtherCAT 主器件和本地微处理器采样握手的方式来访问缓冲区,从而确保不会丢失任何数据。主设备与本地应用还可以使用SPI通信协议进行数据交换。CF110x系列的每一个端口包含一个标准运行指示器和一个链路/活动指示器,在工作时可以通过指示器判断 CF110x系列的工作状态,同时CF110x系列内部集成了64位分布式,在同步模型下,可以提供准确的时钟同步功能。
▲码灵半导体CF1106系列产品结构框图
码灵半导体CF110x系列支持3种工作模式:数字IO模式、模式以及扩展模式。数字IO模型是最简单的一种工作模式,该模型下从站设备不需要外接嵌入式微,可通过 EtherCAT 主器件来监控和控制32个数字IO,还可另外提供了6个控制,该模式一般适用于一些简单的IO控制场合。在单片机模型下,CF110x系列可通过类似于SRAM 的从接口与嵌入式微处理器通信。凭借简单但功能强大的主机总线接口,该器件可通过8/16位外部总线无缝连接到大多数通用8/16/32位微处理器和单片机。同时在单片机模式下该器件也可以通过SPI总线进行访问,该方式也可同时提供多达32个通用IO。扩展模式是指当器件处于SPI模式时,可通过第三个网络端口用来提供额外的MII端口。内置的PHY可通过该端口与ESC连接,以实现树形或星型网络拓扑,同时该端口可配置为上行方向或下行方向。
▲码灵半导体CF1103系列产品结构框图
使用面向实时总线EtherCAT应用的机器视觉系统不仅开发方便、数据传输速度快、实时性高,视觉系统与控制系统间的关系具有确定性,还符合工业控制领域的发展趋势。码灵半导体CF110x系列可为机器视觉系统的EtherCAT通信板、运动控制驱动模块等场景提供实时性、可靠性、低成本的EtherCAT。



全部评论
留言在赶来的路上...
发表评论