机器人模型制作
-
发布了文章 2个月前
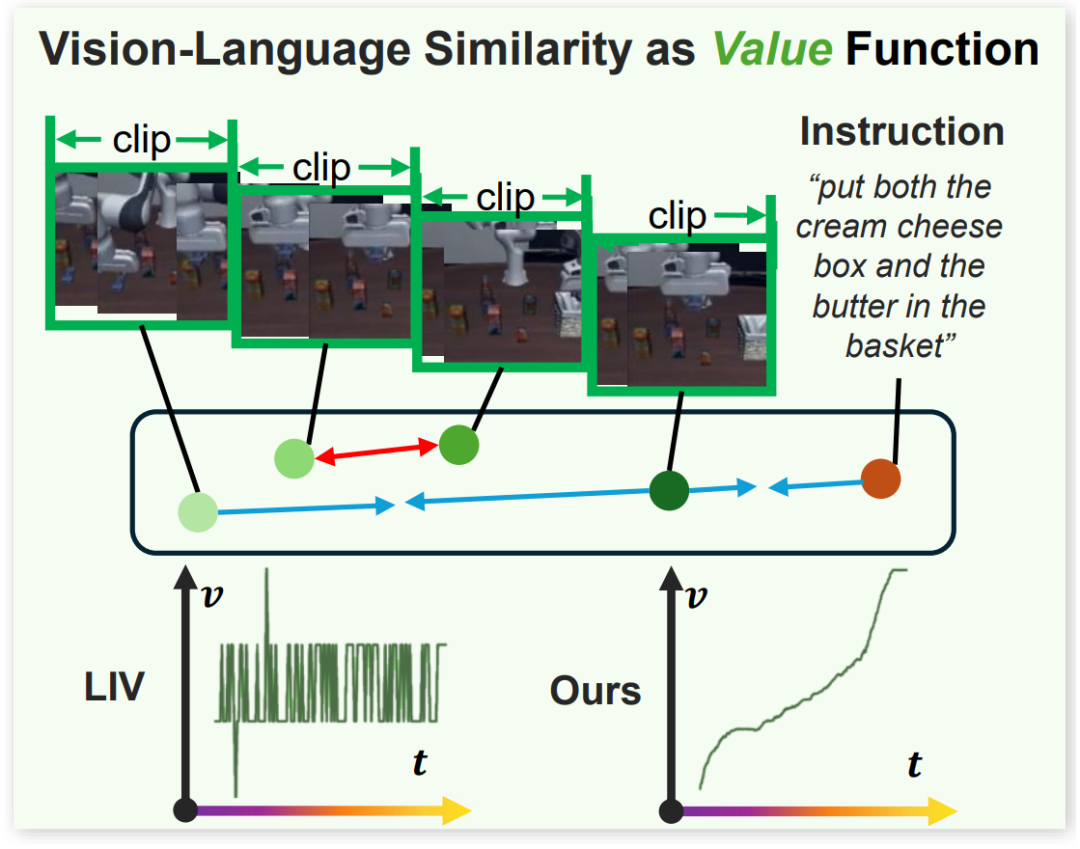
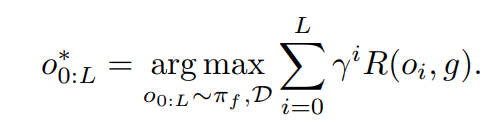
世界模型在机器人任务规划中的全新范式:NUS邵林团队提出通用机器人规划模型FLIP
世界模型在机器人任务规划中的全新范式:NUS邵林团队提出通用机器人规划模型FLIP 本文的作者均来自新加坡国立大学 LinS Lab。本文第一作者为新加坡国立大学博士生高崇凯,其余作者为北京大学实习生张浩卓,新加坡国立...
-
发布了文章 2个月前
大模型接入机器人,对端侧芯片提出高要求
...
没有更多内容



世界模型在机器人任务规划中的全新范式:NUS邵林团队提出通用机器人规划模型FLIP 本文的作者均来自新加坡国立大学 LinS Lab。本文第一作者为新加坡国立大学博士生高崇凯,其余作者为北京大学实习生张浩卓,新加坡国立...
...


没有更多内容