

泛在机器人
-
发布了文章 2个月前
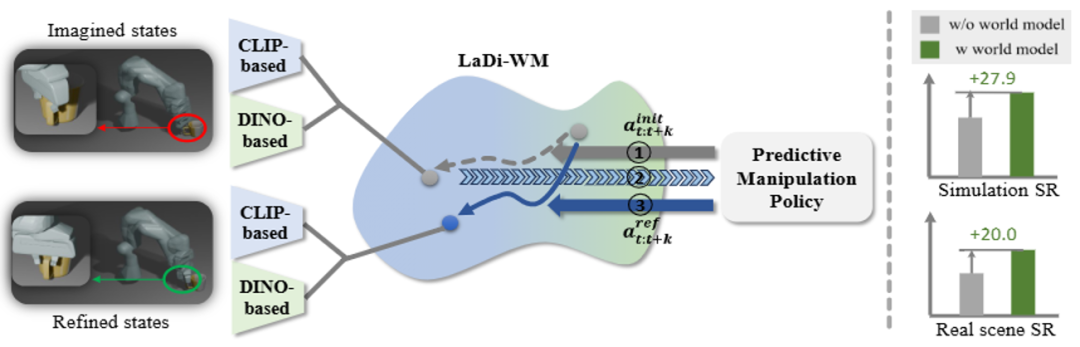
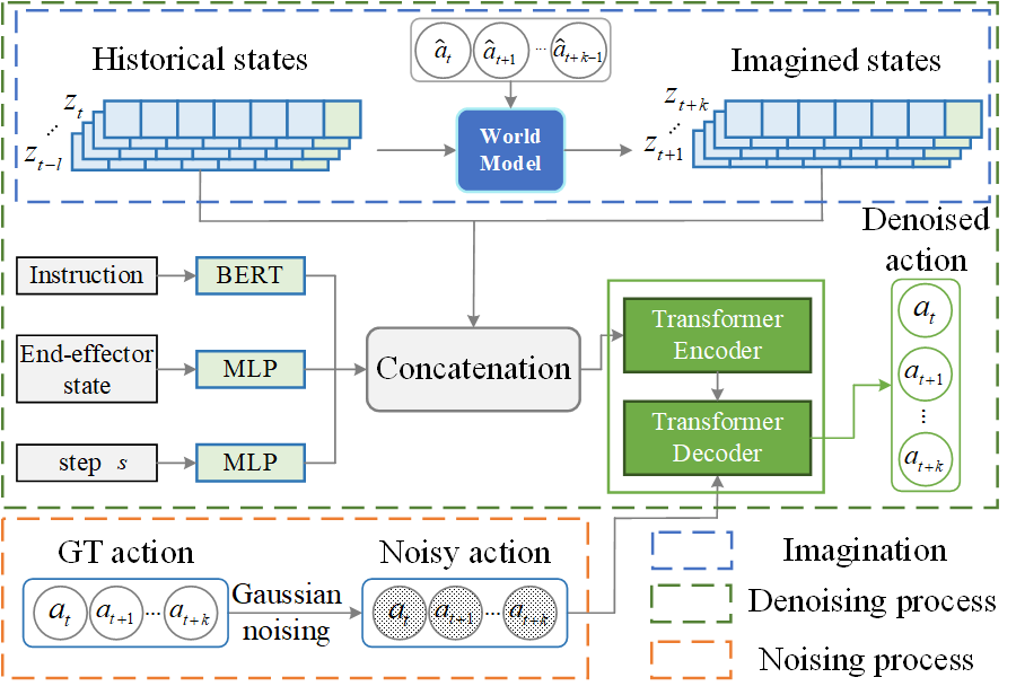
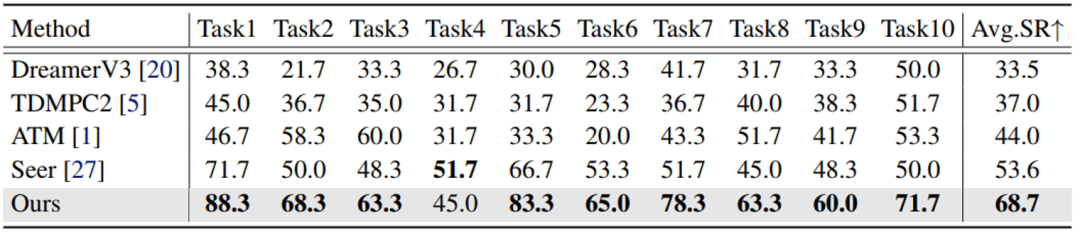
CoRL 2025|隐空间扩散世界模型LaDi-WM大幅提升机器人操作策略的成功率和跨场景泛化能力
CoRL 2025|隐空间扩散世界模型LaDi-WM大幅提升机器人操作策略的成功率和跨场景泛化能力 在机器人操作任务中,预测性策略近年来在具身人工智能领域引起了广泛关注,因为它能够利用预测状态来提升机器人的操作性能。然...
-
发布了文章 2个月前
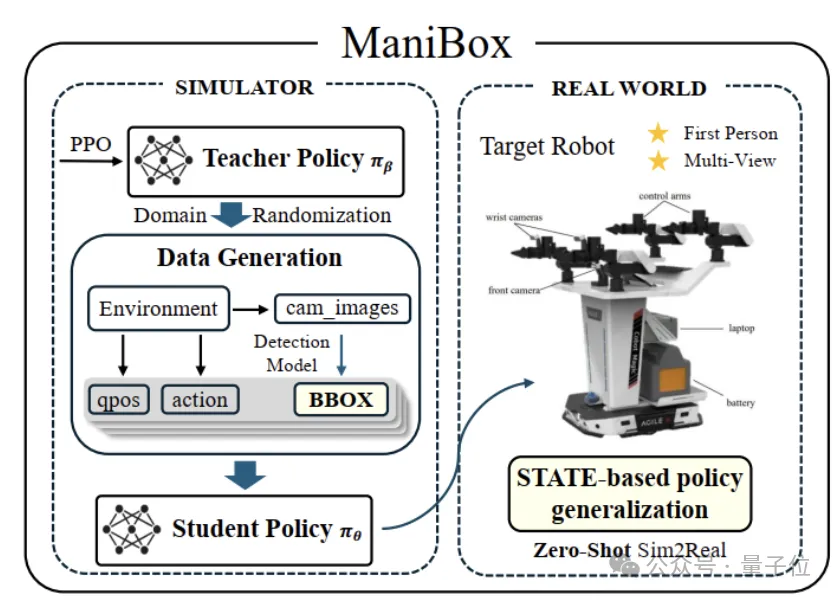
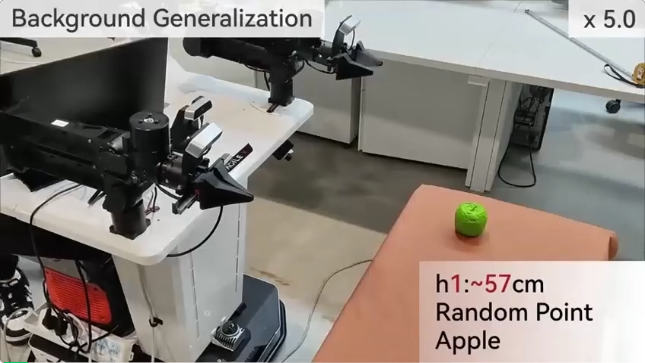
机器人空间泛化也有Scaling Law!清华新国大新算法框架让机器人操作更加鲁棒
机器人空间泛化也有Scaling Law!清华新国大新算法框架让机器人操作更加鲁棒 在机器人空间泛化领域,原来也有一套Scaling Law!来自清华和新加坡国立大学的团队,发现了空间智能的泛化性规律。在此基础上,他们...




没有更多内容